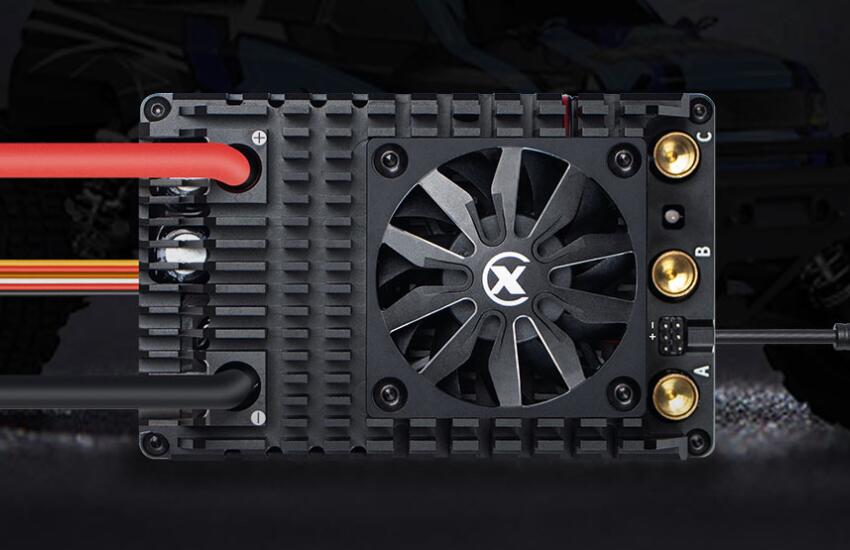
XC 400A Electronic Speed Controller for RC Cars-- Full-featured, Easy-to-use and Performance
Drive motor more efficiently” is our motto. We committed to making full-featured, performance and easy-to-use electronic speed controller. For example, XC201-E3, a BLDC brushless electronic speed controller which we designed for a top RC hobby products supplier, is high-performance and easy to use.
Current
400A continuous current, 800A short circuit protection. Wave-by-wave current limiting will control the peak current avoiding damage to motor and prolonging service life of power system.
Power
6-12S Li-po. When DC is applied, discharge capacity and RBS should be considered.
BEC
Built in powerful DCDC conversion circuit provides potent loading capacity for BEC. BEC provides 6.0V, 7.4V, 8.4V options and 10A continuous current, 25A peak, select the one that is suitable for servo.
Fan is powered by BEC and controlled by ESC. Fan will be turned on when temperature is above 55 degree, and it will sit idle when internal temperature is below 50 degree.
Bluetooth Communication
Static data (ESC records) and real-time running data will be monitored on the mobile app, everything is under control.
You also can manage parameter setting and firmware upgrade on the App.
Precise Active Free-wheeling
Original creative freewheeling identification technology achieves microsecond response for precise active free-wheeling, reducing heat of MOS dramatically. The results are cooler ESC temperature, longer runtime and high performance.
Turbo Timing
This item can be adjusted from 0 degree to 26 degree. It’s usually activated at full throttle on long straightway to unleash extra high performance.
Protection Measure
Multiprotection measures have been designed, under voltage, throttle loss, abnormal braking, over temperature, short circuit, abnormal Hall sensing etc…
Acceleration
12 grades acceleration gives you unique experience from regular start to quick start, even launch control. Before you set this item, you should completely consider the ground, gripping ability of tires, vehicle configuration etc.
Maybe you can’t experience launch control in reality, but you enjoy it through your RC cars. Ignite your passion, enjoy the driving.
Running Mode
a. Forward with brake. This mode is designed for racing with forward and brake function only.
b. Forward and reverse with brake. It’s ideal for training. It brakes on the first time you push the throttle trigger to the reverse/brake zone. If the motor stops when the throttle trigger return to the neutral zone and then re-push the trigger to reverse zone, the vehicle will reverse, if the motor does not completely stop, then your vehicle won’t reverse but still brake, you need to return the throttle trigger to the neutral zone and push it to reverse zone again. This method is for preventing vehicle from being accidentally reversed.
c. Forward and reverse. The motor will reverse immediately when the throttle is pushed to the reverse zone. This mode is often used by special vehicles.
Li-po Cells
ESC will identify the Li-po cells, or you can set the count manually.
Cutoff Voltage
This item prevents excessive discharge of Li-po batteries from causing damage to batteries. The ESC will monitor batteries all the time, once the voltage is lower than threshold value, the power will be cut off in seconds with a 10% braking force. For NiMH batteries, “Disable” is recommended.
Motor Rotation
For setting rotation of motor. Due to different chassis design, the vehicle may reverse despite be given forward throttle. In this case, you need to set “motor rotation” to the opposite direction.
Max. Braking Force
This ESC provides proportional braking function. The braking force is up to the position of throttle trigger. It sets the percentage of available braking power when full brake is applied.
Max. Reverse Force
It refers to reverse speed. Applying different value can generate different reverse speed, it is recommended to use a relatively small reverse speed to avoid errors caused by reversing too quickly.
Drag Brake Force
Refers to the brake force generated by the motor when the throttle trigger returns to neutral position. Choose the appropriate value according to the type of vehicle, configuration, site, etc
Turbo Timing
The Turbo timing can additionally increase the motor rpm. It will be initiated at full throttle. It is usually used on a long straight road to release the maximum power of the motor. The higher
this value is, the more the rpm of the motor will increase, and the greater the running current will be, the higher the temperature of the motor and esc. Therefore, please set this value reasonably.
Turbo Delay
It refers to the duration of continuous full throttle required to trigger Turbo. When the full throttle time reaches this set value, Turbo can be triggered.
Initial PWM
Minimum starting force. It refers to the starting force acting on the motor at the initial position of the throttle. The required starting force can be set according to the tires and
site grip. If the venue is too slippery, set a smaller starting force to avoid slipping.
Xiongcai Technology has been contributing its expertise to specialized field of motor control since 2011. Parts have been adopted by NISSAN, XPeng, FAW Group, Jingyi Group, Cummins, Feilong Automotive Component, and more.